
VALISENS Final Presentation
November 20, 2025 | The project partners present the project results at Fraunhofer IVI in Dresden

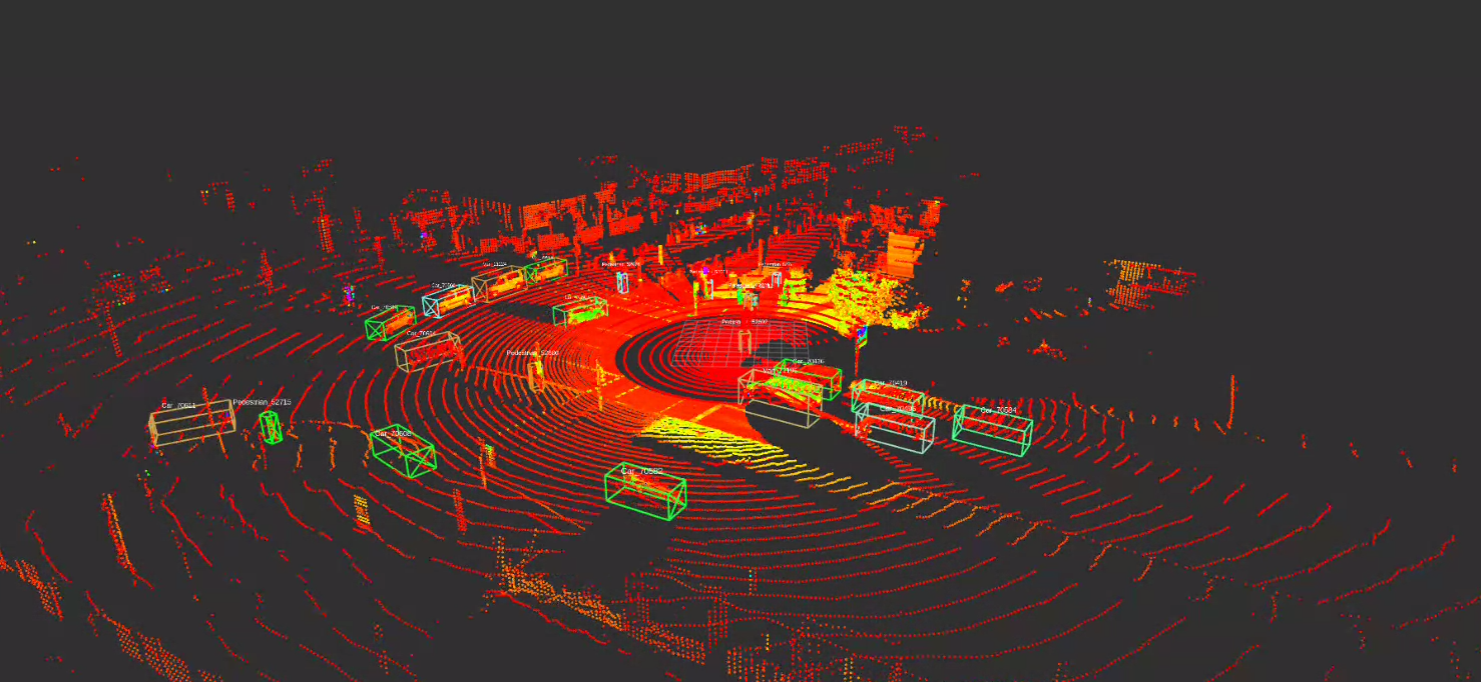
On the 20th of November, all partners gathered in Dresden to present the final results of VALISENS. This included intricate fusion pipelines, communication of the fused results and, last but not least, the generation of a holistic view of the target intersection. XITASO implemented the fusion algorithms (RGB-T 2D-fusion combined with 3D-fusion based on LiDAR and radar) and provided RGB-T camera systems. Smartmicro employed the newest generation of infrastructure radar sensors, while NXP laid the foundation for the next generation of vehicular radar sensors. LiangDao supplied the project with a LiDAR sensor framework, which was employed in the infrastructure, on LiangDao's rover, and their own experimental vehicle. Fraunhofer IVI provided the test beds in Ingolstadt and Dresden, test vehicles and V2X communication. Furthermore, they were also responsible for integration of the partner's sensors in infrastructure and vehicle and conducted research in the aging of sensors and predictive maintenance.
VALISENS Measurement Campaign
July 21-23, 2025 | LiangDao, XITASO and Fraunhofer conduct measurement campaign in Dresden

Colleagues from the partners gathered in Dresden to carry out a combined measurement campaign. For the first time, we brought together all parts of the system, including vehicles from LiangDao and Fraunhofer, LiangDao's rover and Fraunhofer IVI's infrastructure. XITASO provided video cameras (RGB and thermal), LiangDao provided lidar sensors and smartmicro provided radar sensors based on NXP technology. The gathered data will now be processed to determine the parts still to be done till the final demonstration event in Dresden. This event will take place on November 20, 2025. More information, especially regarding time table and registration will follow soon.
Fourth consortial meeting
April 10, 2025 | Consortial meeting hosted by smartmicro, Braunschweig

At the last consortial meeting of the VALISENS project, colleagues from all project partners gathered in Braunschweig to discuss the current state of the project and the tasks still to be done. The project will end with a final demonstration in November 2025.
Hardware equipment in Dresden testbed finalized
December 03, 2024 | Installation of LIDAR and RADAR completed
With the installation of a lidar system from LiangDao and a radar system from smartmicro (based on NXP sensors), the hardware setup in the Dresden testbed is now complete. Both systems allow the detection of objects as well as the classification and tracking. In addition, colleagues from XITASO will use the infrared cameras and edge computers provided by Fraunhofer IVI for object detection, object tracking, and fusion.
Third consortial meeting
October 10, 2024 | Consortial meeting hosted by NXP, Hamburg

Colleagues from all project partners met in Hamburg to discuss the current state as well as to make plans for the final year of the project. This included discussions on use cases and the final demonstrations.
Measurement campaign in Dresden
May 2, 2024 | Multi-modal sensor measurements conducted at Strehlener Platz, Dresden


Colleagues from XITASO and LiangDao conducted a measurement campaign at Strehlener Platz, Dresden, to collect multi-modal sensor data using a mobile system. Sensor modalities included LIDAR, Infrared- and RGB-cameras. The collected data will be used to train detection algorithms.
One goal of VALISENS is the prevention of accidents with Vulnerable Road Users (VRU), like pedestrians or cyclists. As Strehlener Platz was identified as one hot spot for accidents with Vulnerable Road Users (VRU) in Dresden, it was a natural choice for the measurement campaign.
Project VALISENS presented to a professional audience
December 8, 2023 | Pitch presentation at the Automated Driving Conference
Dr. Andreas Eich from LiangDao GmbH, on behalf of all research partners, introduced the VALISENS project to a large audience at the TÜV SÜD conference.
Together with colleagues from XITASO GmbH IT & Software Solutions, the exciting, open, and diverse presentations and discussions were also utilized to gain a deeper understanding of automated driving.
This allows the project developments to be even better aligned with the needs of manufacturers and implementers.
A Cooperative Sensor System for Reliable Assisted Driving
October 17, 2023 | Consortium partners of the VALISENS project gather in Dresden
© Fraunhofer IVI
During the first consortium meeting, the partners of the research project "VALISENS – Valid Innovative Overall Sensor System for Cooperative Automated Driving" convened at Fraunhofer IVI to present and discuss initial results. The project aims to purposefully create a holistic environmental perception for assisted driving, consisting of peripheral infrastructure and the ego-perspective of the vehicle.
The generated comprehensive and valid sensor image serves as a crucial input for automated driving functions within the cooperative overall system. Initial developments have already been showcased at the Fraunhofer IVI test track.