
VALISENS Abschlusspräsentation
20. November 2025 | Die Projektpartner präsentieren ihre Ergebnisse in Dresden

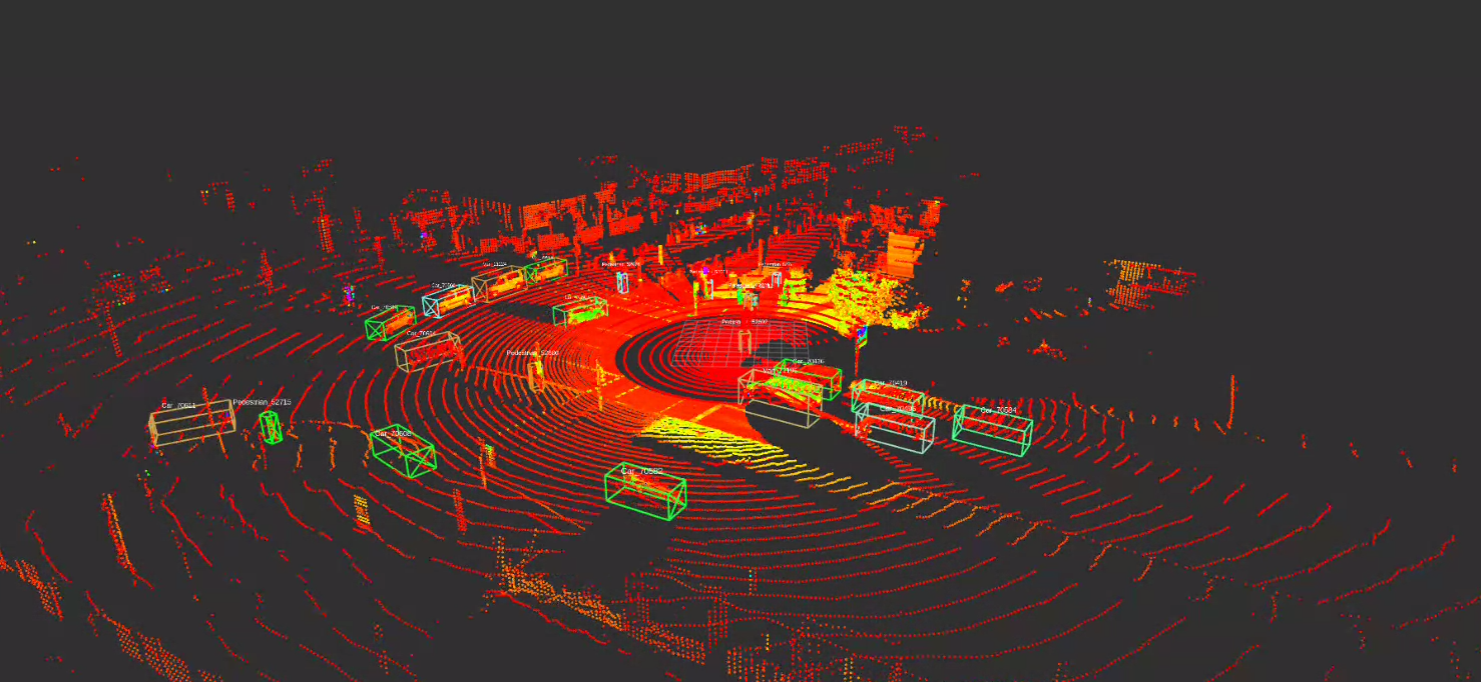
Am 20. November versammelten sich alle Projektpartner in Dresden, um die finalen Ergebnisse von VALISENS vorzustellen. Präsentiert wurden hochentwickelte Datenfusionsverfahren, die Übermittlung der zusammengeführten Daten und der Aufbau eines ganzheitlichen Lagebilds der Zielkreuzung. XITASO stellte Kamerasysteme für Fahrzeuge und Infrastruktur bereit und implementierte eine ausgefeilte Fusionspipeline, die eine RGB‑T‑gestützte 2D‑Fusion mit einer 3D‑Fusion auf Basis von LiDAR und Radar kombiniert. Smartmicro setzte die jüngste Generation von Infrastruktur‑Radarsensoren ein, während NXP die Basis für kommende Fahrzeugradarsysteme legte. LiangDao steuerte ein LiDAR‑Sensorframework bei, das in der Infrastruktur, auf dem eigenen Rover und im Versuchsfahrzeug zum Einsatz kam. Das Fraunhofer IVI stellte Testumgebungen in Ingolstadt und Dresden, Erprobungsfahrzeuge sowie V2X‑Kommunikation bereit, übernahm die Integration der Partnersensorik in Infrastruktur und Fahrzeug und untersuchte die Alterung von Sensoren sowie prädiktive Wartung.
VALISENS Messkampagne
21.-23. Juli 2025 | LiangDao, XITASO und Fraunhofer führen Messkampagne in Dresden durch

Kolleginnen und Kollegen der Projektpartner versammelten sich in Dresden, um eine kombinierte Messkampagne durchzuführen. Erstmals brachten wir alle Systemteile zusammen, darunter Fahrzeuge von LiangDao und Fraunhofer, den Rover von LiangDao sowie die Infrastruktur des Fraunhofer IVI. XITASO stellte Videokameras (RGB und Wärmebild) bereit, LiangDao lieferte Lidarsensoren und smartmicro steuerte Radarsensoren auf Basis von NXP-Technologie bei. Die gesammelten Daten werden nun ausgewertet, um die noch offenen Aufgaben bis zur finalen Demonstrationsveranstaltung in Dresden zu ermitteln. Diese findet am 20. November 2025 statt. Weitere Informationen, insbesondere zur Agenda und zur Anmeldung, folgen in Kürze.
Viertes Konsortialtreffen
10. April 2025 | Konsortialtreffen bei smartmicro, Braunschweig

Beim letzten Konsortialtreffen des VALISENS-Projekts versammelten sich Kollegen von allen Projektpartnern in Braunschweig, um den aktuellen Stand des Projekts und die noch zu erledigenden Aufgaben zu besprechen. Begleitet wurden wir dabei im ersten Teil von einem Vertreter des Projektträgers TÜV Rheinland. Das Projekt wird im November 2025 mit einer Abschlussdemonstration enden.
Sensorausstattung im Testfeld Dresden abgeschlossen
03. Dezember 2024 | Installation von LIDAR- und RADAR-Sensoren
Mit der Installation eines Lidarsystems von LiangDao und eines Radarsystems von smartmicro (basierend auf Radarsensoren von NXP) wurde die Sensorausstattung im Testfeld Dresden abgeschlossen. Beide Systeme erlauben, neben der reinen Detektion, sowohl die Klassifizierung als auch das Tracking von Objekten. Weiterhin werden Mitarbeitende von XITASO Objektdetektions-, Objecttracking- und Objektfusionsalgorithmen implementieren. Dafür werden Infrarotkameras und Recheneinheiten benutzt, die vom Fraunhofer IVI bereitgestellt werden.
Drittes Konsortialtreffen
10. Oktober 2024 | Konsoritaltreffen bei NXP, Hamburg

Mitarbeitende von allen Projektpartnern trafen sich in Hamburg um den aktuellen Stand des Projekts zu und die nächsten Arbeitsschritte zu diskutieren. Ein besonderer Augenmerk lag dabei auf den Use Cases sowie der Abschlusspräsentation.
Messkampagne in Dresden
02. Mai 2024 | Multi-modale Sensormessung am Strehlener Platz in Dresden


Mitarbeiter von XITASO und LiangDao haben am Strehlener Platz in Dresden eine Messkampagne durchgeführt. Ziel war die Aufnahme vom multi-modalen Sensordaten (LIDAR, Infrarot- und RGB-Kameras). Diese Daten werden dann für das Training der Detektionsalgorithmen benutzt.
Ein Ziel von VALISENS ist der Vermeidung von Unfällen mit vulnerablen Verkehrsteilnehmern (sogenannte VRU). Da der Strehlener Platz in der Vergangenheit eine erhöhte Anzahl von Unfällen mit VRUs aufwies, war er eine naheliegende Option für die Messkampagne.
Projekt VALISENS vor Fachpublikum vorgestellt
08. Dezember 2023 | Pitch-Vortrag im Rahmen der Tagung Automatisiertes Fahren
Dr. Andreas Eich von LiangDao GmbH stellte im Namen aller Forschungspartner das Projekt VALISENS auf der TÜV SÜD Tagung einer großen Fachöffentlichkeit vor.
Gemeinsam mit Kollegen von XITASO GmbH IT & Software Solutions wurden die spannenden, offenen und diversen Vorträge und Diskussionen zudem genutzt, um ein noch tieferes Verständnis für das automatisierte Fahren zu gewinnen.
Dadurch können die Entwicklungen im Projekt noch besser auf die Bedarfe der Hersteller und Implementierer abgestimmt werden.
Ein kooperatives Sensorsystem für das zuverlässige assistierte Fahren
17. Oktober 2023 | Konsortialpartner des Projekts VALISENS treffen sich in Dresden
© Fraunhofer IVI
Im Rahmen des ersten Konsortialtreffens kamen die Partner des Forschungsvorhabens »VALISENS – Valides innovatives Gesamtsensorsystem für kooperativ-automatisiertes Fahren« am Fraunhofer IVI zusammen, um erste Ergebnisse vorzustellen und zu diskutieren. Ziel des Projekts ist die gezielte Schaffung einer ganzheitlichen Umfeldwahrnehmung – bestehend aus der peripheren Infrastruktur und der Ego-Perspektive des Fahrzeugs – für das assistierte Fahren.
Das erzeugte ganzheitliche valide Sensorbild dient als wesentlicher Input für automatisierte Fahrfunktionen im kooperativen Gesamtsystem. Erste Entwicklungen konnten bereits auf dem Testoval des Fraunhofer IVI präsentiert werden.